SRI’s vision-based systems enable safe operations of moving unmanned ground vehicles around stationary and moving people in urban/cluttered environments.
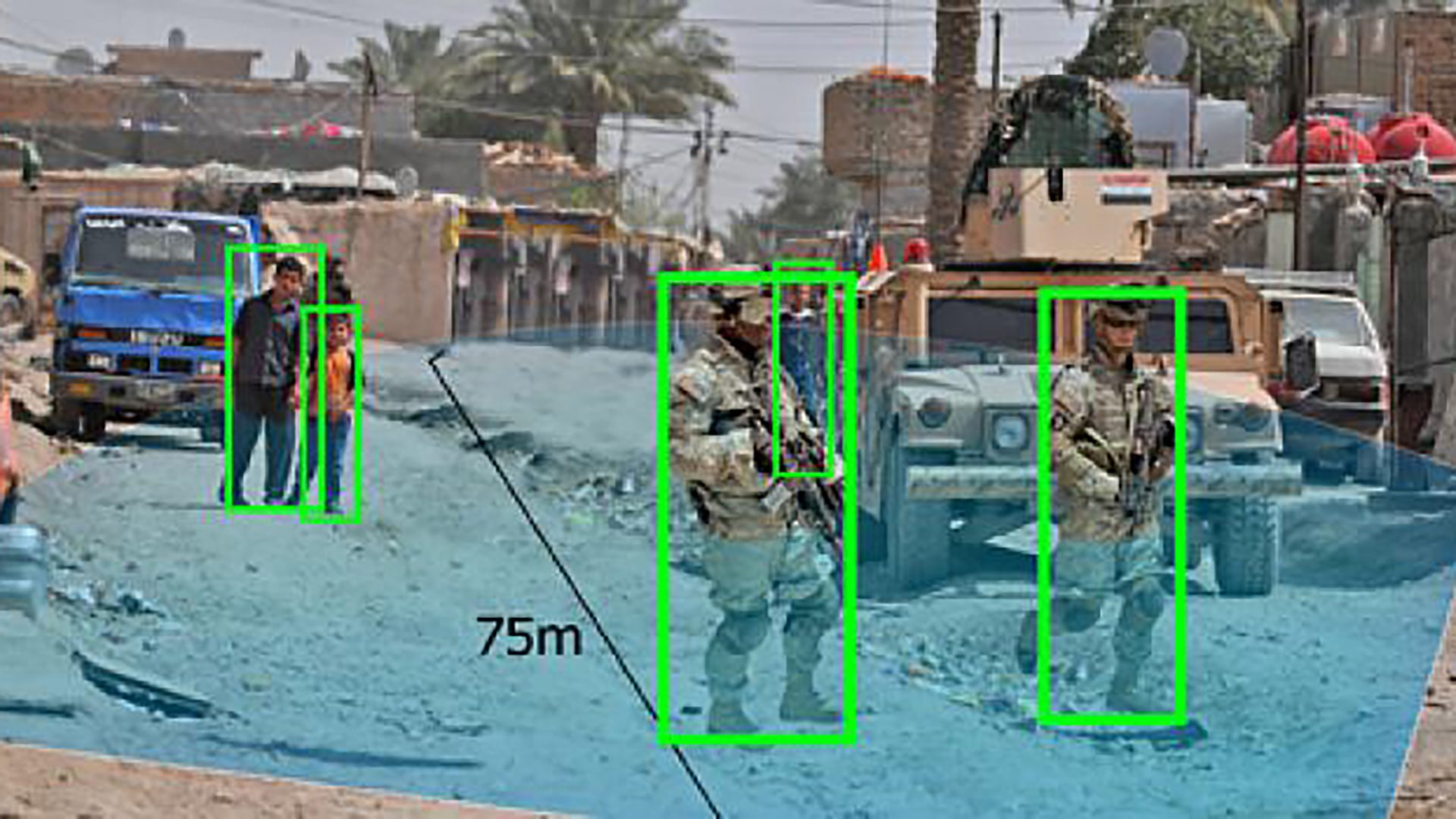
Under the Navy Explosive Ordnance Disposal project, SRI has developed a real-time, fused-sensor system that significantly improves stationary and dynamic object detection, pedestrian classification, and tracking capabilities from a moving unmanned ground vehicle (UGV). The system is designed to operate on a UGV traveling up to 25 miles (40 kilometers) per hour, under day and night conditions, and on primary and secondary roads. It can also detect and track pedestrians up to 50 meters away.
By fusing multiple sensors and incorporating appearance and shape for classification and tracking, SRI’s advanced recognition system improves the detection rate and reduces the false alarm rate. This allows a UGV to safely and autonomously navigate in crowded environments. Pedestrian tracking based on shape and appearance allows a UGV to maintain the identities of detected pedestrians and track them even when they are occluded briefly or surrounded by clutter, enabling line-of-sight following for surveillance and reconnaissance applications.